
Hi! I am a fourth-year PhD student at Texas A&M University, advised by Prof. Reza Langari and Prof. Zhengzhong Tu. Previously, I worked with Dr. Shu Kong and Gaurav Pandey. I earned my undergraduate degree in Mechanical Engineering from Politecnico di Torino. My current research is primarily centered on computer vision and language-vision models for self-driving car applications.
🔥 News
- 2025.06 🎉🎉 Started as AI Engineer intern at Rivian and Volkswagen Company.
- 2025.05 🎉🎉 Joined the TACO Group under the supervision of Dr. Zhengzhong Tu.
- 2024.10 🎉🎉 Successfully demonstrated our first remote perception capabilities for the Mcity Demo Project [Link].
- 2024.07 🎉🎉 Completed approximately 20 miles in autonomous mode under rainy weather conditions during the first AVA project demo on a public road.
- 2024.06 🎉🎉 SwinMTL paper was accepted to IROS’24 [code].
📝 Publications
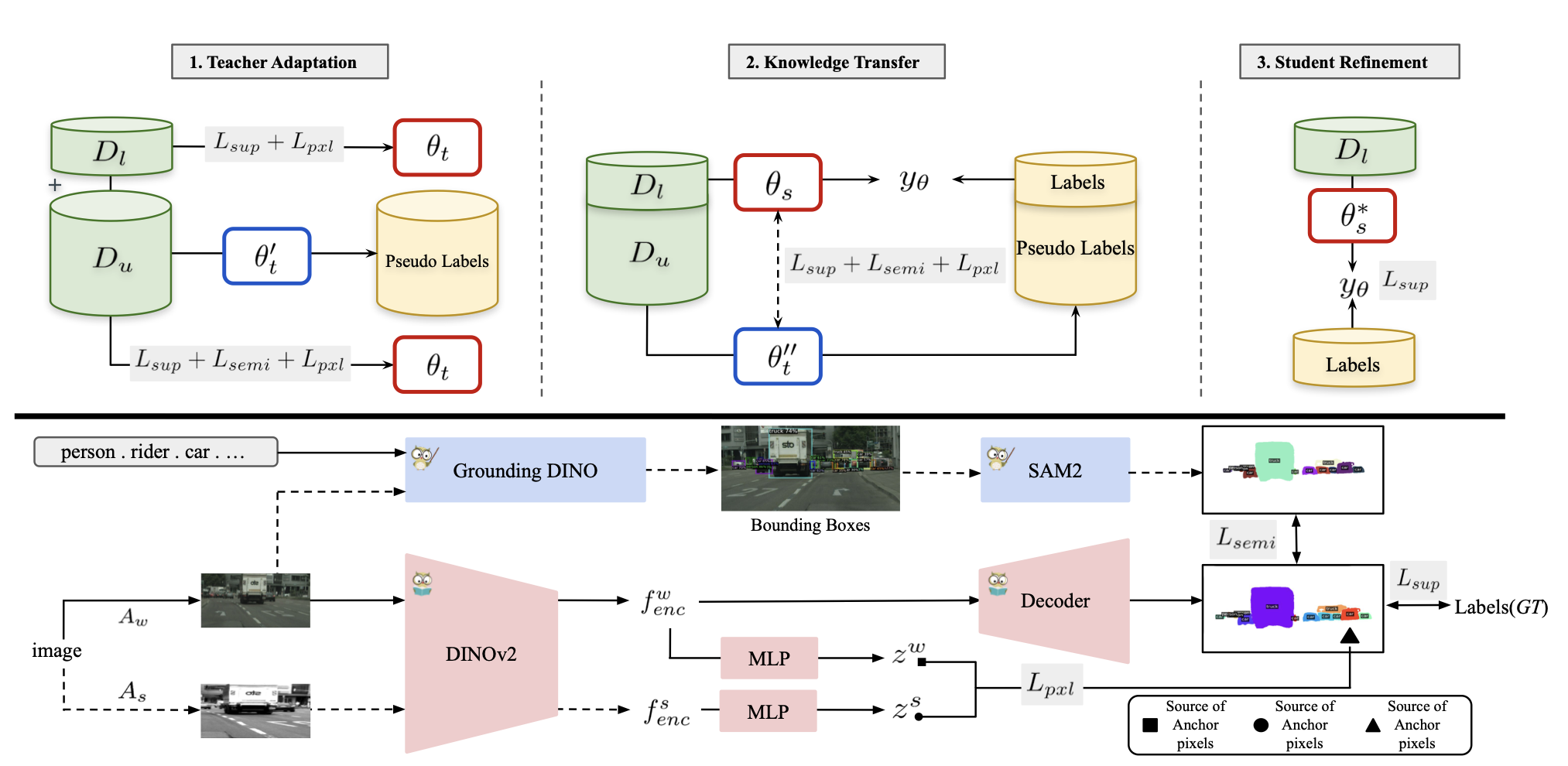
CAST: Contrastive Adaptation and Distillation for Semi-Supervised Instance Segmentation Pardis Taghavi, Tian Liu, Renjie Li, Reza Langari, Zhengzhong Tu
- CAST is a semi‐supervised knowledge distillation(SSKD) framework that compresses pretrained vision‐foundation models (VFMs) into compact expert networks by leveraging limited labeled data and abundant unlabeled data via stage‐wise fine‐tuning coupled with a contrastive self‐supervised loss.
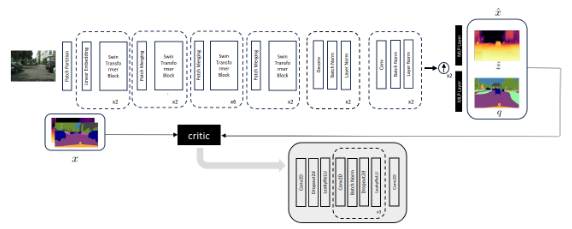
SwinMTL: A Shared Architecture for Simultaneous Depth Estimation and Semantic Segmentation from Monocular Camera Images Pardis Taghavi, Reza Langari, Gaurav Pandey code | arXiv
- A simple and effective multi-task learning framework that allows concurrent depth estimation and semantic segmentation using a single camera and without compromising computational efficiency.
Projects

AVA: Autonomous Vehicles for All
- Lead of the Perception Team : Developed a perception system tailored for diverse route scenarios, including both urban and rural environments.

MCITY 2.0 USE CASE AV PERCEPTION
- 3D point cloud generation and clustering techniques for improved object detection and scene understanding from a single RGB image.
- Validated algorithm outputs through simulation and remote operation on a real autonomous test vehicle at MCity 2.0.
🎖 Honors and Awards
- 2024.06 NSF Subaward for Autonomous Vehicle Perception Testing at MCity.
- 2021.09 Graduated Summa Cum Laude from Politecnico di Torino University.
- 2018.09 Won TOPolito Scholarship: Awarded to the top 10 students of the engineering school.
📖 Education
- 2022.01 - present, PhD Student, Texas A&M University
- 2018.09 - 2021.09, Bachelor’s Degree, Politecnico di Torino University